特斯拉的骚屁股,被蛇形机器人"扑哧"一下后插进去了!
百家车坛

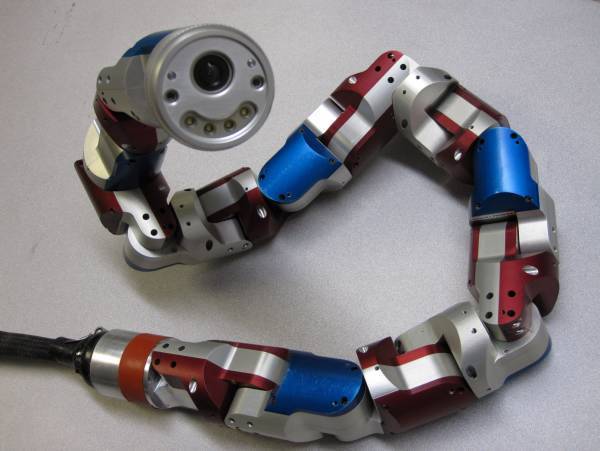
特斯拉专门为车主开发了一款配套的蛇形自动充电机器人,并在@Tesla Motors的官方Twitter账号上放出了这款原型设备的工作视频。▼

特斯拉的好意其实是为了帮助车主省去自己插充电器的麻烦~~~当车辆停好之后,这个蛇形充电机器人会自动寻找特斯拉的充电口,然后自动弯下身来自动与接口对接充电。整个过程不需要人工的参与。
这种蛇形机器人早在1976年就有人开始研究了。但是能形成产品上市的基本没有。。。为什么?因为这种机械结构和运动方式的机器人在运行过程中自由度极高,又是串行结构,所以很难控制。

同样长度的机械臂,为实现像蛇一样的的灵活度,需要的关节数很多,如何做到运动上的精度,是很难的事情。特斯拉这条蛇形机械臂,上面有二十个关节,这给机械结构和控制方法都提出了很高的要求。

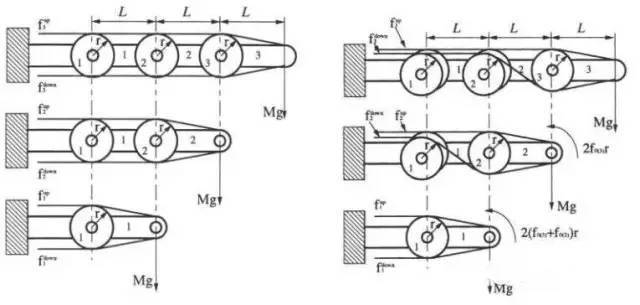
这种串行机械臂,有三类基本结构。
CMU蛇形机器人,可以爬树侦查
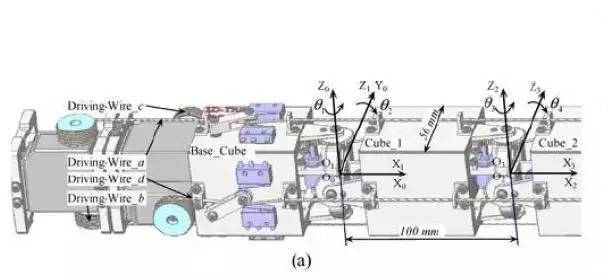
第二类蛇形机器人结构是将驱动器全部置于基座内,利用机械传动实现各个关节的控制。此次特斯拉的蛇形机器人即是采用这种方式。
第三类是连续型结构,Festo著名的气动象鼻是此类结构的代表之作。
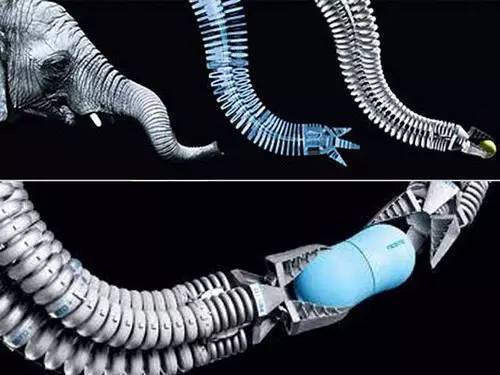
Festo 的气动象鼻结构设计
这种气动象鼻结构的特点是整个机器人的电机数目小于机械结构的自由度数,自由度通常是10个以上,对于软结构而言则是无穷多了。。。一起看看这个气动象鼻的设计。
至于运动姿态控制就更是此类机器人的难点了,这里就不详细分析了,理工男可以自己去网上搜索相关材料一探究竟。。。
最后,再看看这个蛇形机器人的闷骚姿态吧。。。

评论(0)

 都说我是“实力派” 全面体验哪吒X
都说我是“实力派” 全面体验哪吒X
 它会让你爱上长途自驾游
它会让你爱上长途自驾游
 2023款深蓝SL03探店解析
2023款深蓝SL03探店解析
 多场景体验哈弗枭龙MAX
多场景体验哈弗枭龙MAX
 16万级家用SUV“显眼包”
16万级家用SUV“显眼包”
 城市里的远方 女生的伴侣——哪吒V
城市里的远方 女生的伴侣——哪吒V